A星算法,可以实现三维路径规划,对路径规划和A星算法感兴趣的可以借鉴参考
”AStar 路径规划三维 三维A星算法 路径规划 三维路径规划“ 的搜索结果
A星算法的寻路,最优路径的寻找,障碍物可自行设计 matlab代码
基于改进A星算法的无人机三维地图路径规划
基于标准A星算法的无人机三维地图路径规划

1-基于领航跟随法+A星 A* Astar结合人工势场APF 的多智能体编队动态避障。2-改进的A星+改进的人工势场(A*-APF)混合算法。6-基于领航跟随法与人工势场APF多智能体编队动态避障。...3-三维DWA 路径规划。
基于标准A星算法和平滑度优化的无人机三维地图路径规划




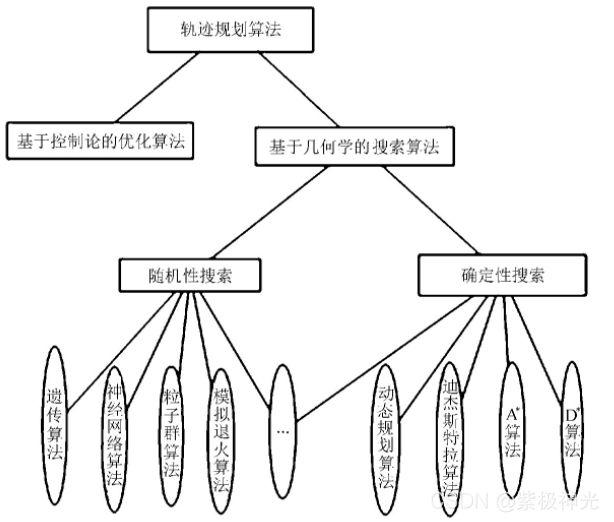
最佳优先搜索(Best-First Search)最佳优先搜索(BFS),又称A算法,是一种启发式搜索算法(Heuristic Algorithm)。[不是广度优先搜索算法( Breadth First Search , BFS )]BFS算法在广度优先搜索的基础上,用启发...
考虑无人机等在进行直角拐弯时,速度会受到影响,进而增加耗能,因此增设参数quarter_turn表示每一次直角拐弯的代价,使规划的路径尽可能减少直角拐弯的次数,也使的路径更加圆滑。在findvalue函数中,将原有的四...

该代码是基于C++的STL库,通过Easyx图形库编写的机器人路径规划中的经典A*算法


基于A*的三维航迹规划算法,可以设置禁飞区和加载地形图,自定义设置起点和终点,可以设置多条航线。


在机器人的路径规划中,A星算法是一种常用的启发式搜索算法,它能够快速和准确地找出起点到终点之间的最短路径。然后,在每次循环中,我们选择开放列表中代价和估计值之和最小的节点进行扩展,直到找到终点或者开放...


算法介绍A*(念做:A Star)算法是一种很常用的路径查找和图形遍历算法。它有较好的性能和准确度。本文在讲解算法的同时也会提供Python语言的代码实现,并会借助matplotlib库动态的展示算法的运算过程。A*算法最初发表...
路径规划(一): A*算法
标签: 路径规划
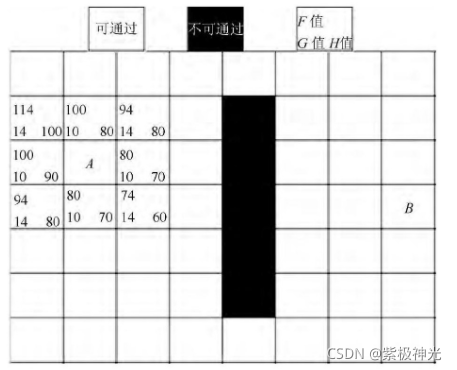
如图所示简易地图, 其中绿色方块的是起点 (用 A 表示), 中间蓝色的是障碍物, 红色的方块 (用 B 表示) 是目的地. 为了可以用一个二维数组来表示地图, 我们将地图划分成一个个的小方块. 二维数组在游戏中的应用是很多...
A*算法涉及时间的路径规划
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地